Last week I traveled to Lockport Louisiana for the final NSRP Computer Aided Robotic Welding (CAR-W) demonstration. The demonstration showed how you can leverage the weld information within the ShipConstructor 3D product model to drive a 9-axis robotic arm mounted on a gantry with minimal user intervention. There was absolutely no programming of the robot required since all the weld path and attribute information was generated from the ShipConstructor Marine Information Model and passed to Wolf Robotics CAR-W software. This is where the weld planning path magic happens as well as the kinematics calculation for the collision free movement of the robot. This all happens behind the scene with no input from the user.

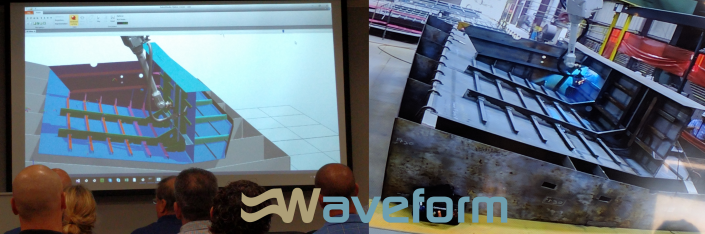
The CAR-W phase I demo which I blogged about before (“Driving Automatic Welding Robots from ShipConstructor”) was focused on unique flat panels. However, this phase II was demonstrated on a more complex assembly which has double curvature. Check out the assembly with weld information below:
Game Changer
I have been to many (~50) shipyards across the globe and I have never seen this type of automation before. This is truly a game changer for our industry but as we heard from other industry experts at the demonstration, this seamless solution which reads weld information from the 3D model and requires no robot programming has tremendous potential.
There are definitely shipyards which are automatically welding complex assemblies but in these cases the shipyard is spending days to capture the welding information and programming the robot for a single assembly. This high amount of initial investment can only be beneficial in the scenarios where the shipyard will weld the exact same assembly many times. This high volume use case is common when building tankers for example which have many common assemblies in the mid-body and usually have a series contract (multiple ships). However, the majority of shipyards do not have the luxury of having many assemblies that are the same. Almost every single assembly on a ship is unique and therefore the amount of time it would take to program the robot is outweighed by the time saved by automatically welding.
The solution that was demonstrated transfers the welding information already contained in the 3D product model to an automatic robot path planning tool. The welding information transferred contains all the relevant attribute information which the planning tool uses for all the very complex 9-axis kinematic math. This streamlined process produces the results which can drive a robot collision free with pin point accuracy which is amazing. The new process significantly reduces the amount of time to prepare an assembly for robotic welding and therefore it will now be cost effective for the majority of the global shipyards.
SSI’s Journey

SSI’s journey to where we are today started back in 2007 with an NSRP project on weld management. This project was focused on automatic weld generation, identification, traceability and documentation. This project provided a lot of insight and captured industry expertise. After successful completion of this project, SSI invested over 3 years to create a WeldManagement product which has been used by our clients for several years.
The next stage of our journey was the creation of the EnterprisePlatform which allows extraction of virtually any information contained within the ShipConstructor Marine Information Model (MIM) to a context which needs to be consumed by any stakeholder. This stakeholder could be a person in a specific department or a robot. The EnterprisePlatform was a key reason why SSI was able to provide our deliverables in the short time span of the project.
In 2015 this NSRP CAR-W was awarded and within a year we demonstrated the robotic welding driven by ShipConstructor data using a real robot on flat panels. A year later (last week), we continued our amazing progress and demonstrated driving a robot from the CAD model on a more complex assembly which has double curvature.
Accomplishing the Impossible
When we started this project there were many people in our industry that thought this was impossible. I can understand why as the challenges that needed to be overcome were not trivial. The core team (SSI, Wolf Robotics, EWI and Bollinger) that we put together for this project is the real reason this project was successful. To be 100% honest SSI did not have the most difficult part in the project. The award goes to Wolf Robotics without a doubt which was able to solve the kinematics and many other very difficult problems. I would also like to give kudos to Bollinger for being a very innovative and collaborative shipyard. I truly think without this exact team, we would not have accomplished what we did.
Closing Remarks
The push for Industry 4.0 or smart manufacturing has many shipyards looking at how they can improve their manufacturing capabilities. Combine that with the aging workforce about to retire, taking all the tribal knowledge with them, it is imperative shipyards find some mechanism to capture that knowledge in a way that can be used in the future. With the abilities of today’s robots and the capabilities of today’s software to capture some knowledge, robotic welding is a perfect activity to streamline.
For the majority of shipyards with a low volume and high variety ships, the initial investment of programming a welding robot outweighs the benefit of the time and effort required to manually weld. With CAR-W we eliminate the programming of the robot and in essence are driving the robot from the information already contained in the ShipConstructor model via the EnterprisePlatform. This was once thought to be impossible and we have proven again with our second and final demonstration that it is possible.
This is truly a game changer and I am happy to say that SSI is on the cutting edge of this new technology.